水中ドローンRov-Fun


2023/10/20
スキャニングソナーの音響画像を理解するために画像の見方やROV搭載時のテクニックをご紹介します。 参考画像ではPing360とBlueROV2を使用していますが、他のスキャニングソナーとROVの組み合わせでもほぼ同様です。 参考メーカーサイト 動作原理 スキャニングソナーの詳しい説明はこちらでも紹介したとおり、音響ビームを放ち、エコーを記録して物体や空間を認識する商品です。 音速と物体までの距離 水中での既知の音速とエコーを受信した時刻を組み合わせることで、対象までの距離を計算することができます。 距離 ...

2023/1/22
水中ドローンBlueROV2を運用する間に、必ず行わなければならないのが真空テストです。これは4インチの電子エンクロージャー内と3インチのバッテリーエンクロージャー内の空気を一定数値抜き、15分放置し漏れを調べるものです。メーカーから発売されているポンプが新しくなったのでそれの使い方を解説します。 Mityvac手動真空ポンプ このポンプはPRESSUREとVACUUMの切り替えがあります。 真空ポンプの側面にあるノブを回して、「VACUUM」設定にします。 バキュームプラグの1つをバッテリーエンクロージ ...
2023/1/22
通信機器に割り当てられるIPアドレスやサブネットマスクについて解説します。 MACアドレスとは MACアドレス(Media Access Control address)とはネットワークにつながるすべての機器に割り当てられている識別番号です。 下図のとおり「ベンダ識別子」「ベンダ内管理番号」からなり、0~Fの16進数で表されます。このアドレスは世界で唯一の番号です。 IPアドレスとは IPアドレス(Internet Protocol Address)もコンピュータが通信相手を特定するという意味において、M ...

2023/1/22
テスターは1台で、電圧や抵抗、電流などが測れる便利な計測器です。測定値がアナログの針で数字を示すタイプと、デジタル表示のタイプがあります。 1台で何役もこなす便利なテスターです。しかし、間違えた使い方をすると、テスターが故障するだけでなく、電気設備や取り扱い者がケガをする恐れもあります。 今回は、現場でよく使われるHIOKIのカードハイテスタ3224-60を例に取り扱いを説明します。 テスターの各部名称 本体とプラスとマイナスのテストリード、これはどのテスターでも共通です。HIOKI 3324-60はデジ ...

2023/1/22
ドームエンドキャップの赤丸の部分のネジをすべて外します。 これでドームエンドキャップが外れます。フランジとの間にOリングがありますので、それも外します。 ゴミや髪の毛が付着しないようにきれいに再度グリスを付けてOリングを取り付けます。 新しいドームエンドキャップを取り付け、取り外したネジを対角線上に均等に締めます。一度に強く締めるのではなく、何回かに分けて徐々に占めてください。 強く締めすぎるとドームエンドキャップが内部で割れ浸水の原因にもなりますのでご注意ください。

2023/1/22
※すべてのネジにはネジロック材を1滴たらし均等に広げてください。 標準バージョンの場合、2.5 mm六角ドライバーで2本のM4x10ネジを使用して、各フレーム脚の下部に2本のゴム製脚を取り付けます。2つの同じものを組み立てます。 大型バージョンの場合、2.5 mm六角ドライバーで2本のM4x10ネジを使用して、各フレーム脚の下部に3本のゴム製脚を取り付けます。 最初のフレームの半分を組み立てる 6本のM4x20ネジと2.5mm六角ドライバーを使用して、2本の脚と1本のフレームのハンドルをサイドパネル側にネ ...

2023/10/20
BlueROV2を水中に入れる前には、真空テストを必ず行ってください。 また、ペネトレータやOリングを交換するなど、シールを傷めるものを交換した後も真空テストが必要です。 このテストは、エンクロージャー内に外部から空気が入り込むかチェックしています。真空ポンプで一定数まで空気を抜き放置します。その後、空気が入らなければ問題なし。空気がどこからか入り、数値が下がれば水中に入れてはいけません。空気が入るという事はどこからか水が浸入してくることを意味しています。 下記の手順でチェックをしてみましょう。 Blue ...

2023/4/16
BlueROV2のバッテリーを装着するには、次の手順で行ってください。 ※機体に砂埃やゴミが付着しない場所で作業をしてください。 バッテリエンクロージャーからベントプラグを外し、次にエンドキャップを取ります バッテリエンクロージャーからバッテリーを外します バッテリーはコネクターの形が合うように接続します。 バッテリーを接続した後、エンクロージャーへ入れてください。 バッテリーのケーブルに負荷が掛からないように丸めて収納します。 バッテリーエンクロージャとエンドキャップの間に大きな隙間ができないように閉め ...
2023/1/22
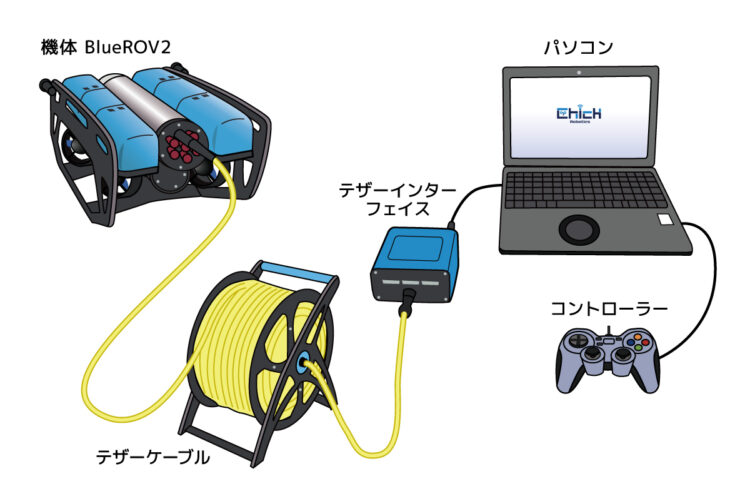
接続する箇所は下記の5点。 機体とリールから出ているテザーケーブル(リールがない場合はテザーケーブル) 機体フレームとテザーケーブルをカラビナ部分で接続 リールとテザーインターフェース(短い黄色いテザーケーブル) テザーインターフェースとPC(USB接続) PCとコントローラー(USB接続) ※順不同 機体とリールから出ているテザーケーブル(リールがない場合はテザーケーブル) テザーケーブルと機体を繋ぐ8ピンコネクタは凹凸を合わせて接続します。 写真のように1パターンしか入らないようになっています。 接続 ...

2023/4/21
オペレーティングシステムとサポートソフトウェアは、事前設定された.imgファイルをSDカードに書き込んでインストールし、SDカードをコンパニオンコンピューター(Raspberry Pi)に挿入します。 準備 コンパニオン画像をダウンロードします ダウンロード イメージのダウンロード中に、Etcherをダウンロードしてインストールします。OSに合ったバージョンをダウンロードしてください。 Etcherダウンロード Etcherのインストール ダウンロードしたbalenaEtcher-Setup-xxxをダブ ...
2023/1/22
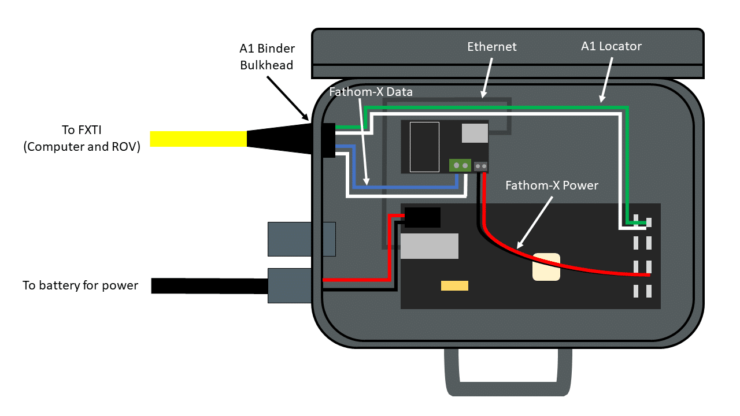
水リンク水中GPSは、音響測位とGPSを水中の位置を表示させます。 接続にはこちらのキットを使います。 ボックスの側面にあるイーサネットケーブルをWater Linkedボードの下に配線し、Fathom-Xモジュールに差し込みます。 青と白のワイヤーをFathom-Xボードの正と負のテザー入力端子に接続します。 A1プラグを緑と白のワイヤーでA1レセプタクルに差し込みます。 WaterLinkedボックス内 WaterLinkedシステムの設定 すべての接続が完了し、機体に電源が入っていることを確認し、ブ ...

2023/1/22
Binder770コネクタは、テザー接続用の標準コネクタになります。 コンパクトなサイズであるコネクタは8ピンで、嵌合されるとIP67防滴となります。現在、Binder770コネクタはFathomテザーに全てに事前に取り付けられるようになりましたが、このコネクターを使って古いテザーを改造することが可能です。 コネクタの電流定格はピンあたり2Aで、定格は175V(1750Vインパルス)、5000を超える嵌合サイクルを処理することができます。ピンは金メッキ加工がされています。 Binder 770コネクタへの ...