水リンク水中GPSは、音響測位とGPSを水中の位置を表示させます。
接続にはこちらのキットを使います。

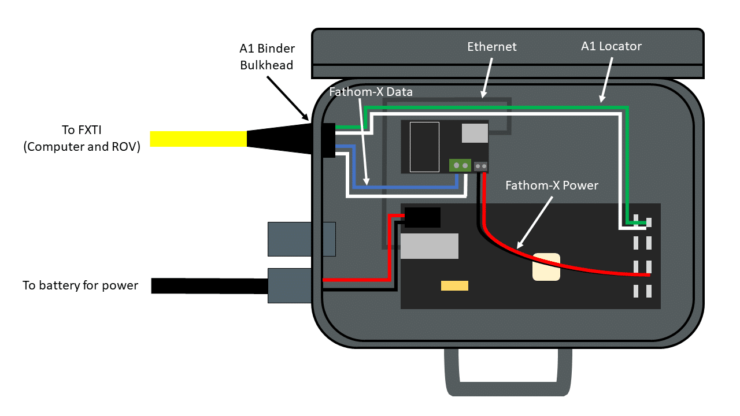
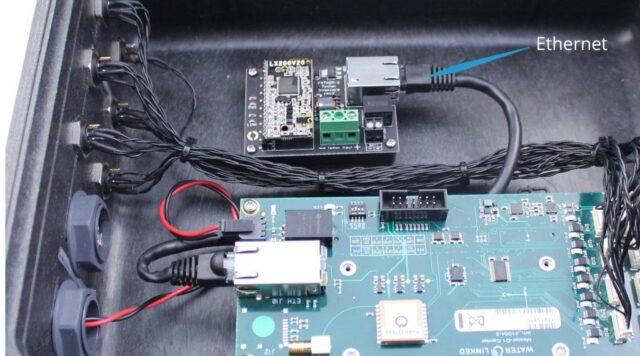
ボックスの側面にあるイーサネットケーブルをWater Linkedボードの下に配線し、Fathom-Xモジュールに差し込みます。
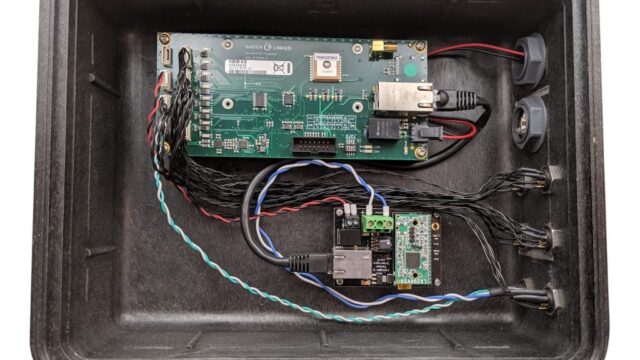
青と白のワイヤーをFathom-Xボードの正と負のテザー入力端子に接続します。

A1プラグを緑と白のワイヤーでA1レセプタクルに差し込みます。

WaterLinkedボックス内

WaterLinkedシステムの設定
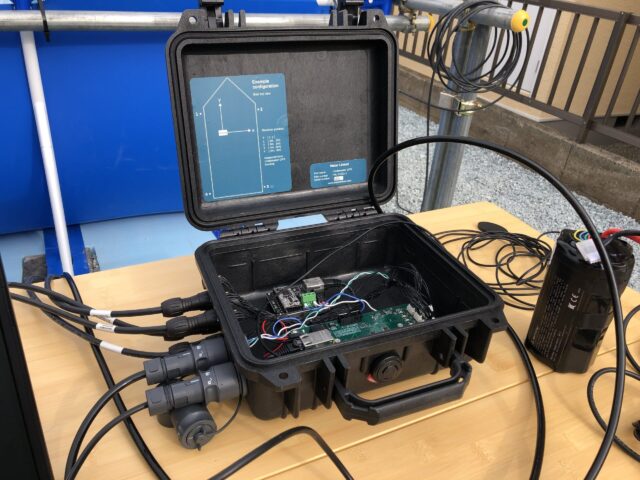
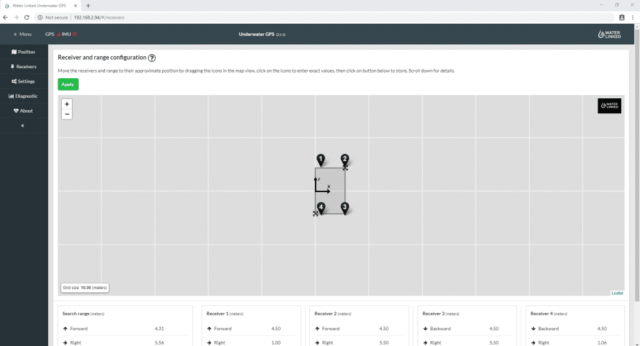
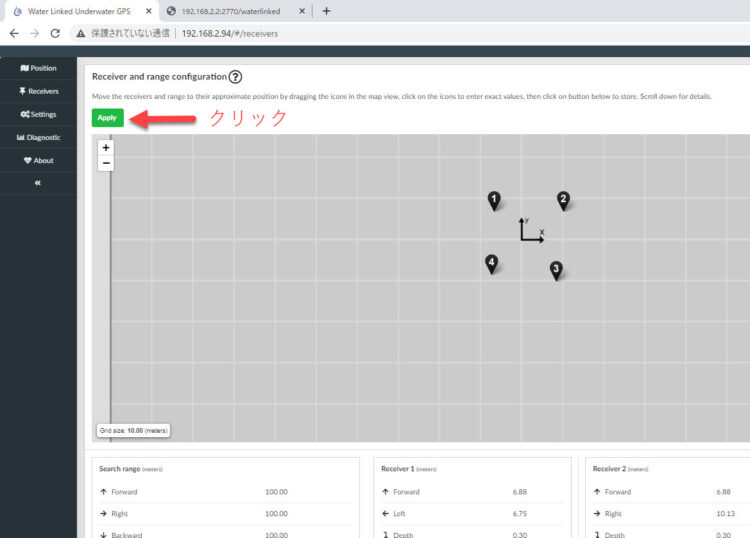
すべての接続が完了し、機体に電源が入っていることを確認し、ブラウザーでhttps://192.168.2.94/#/receiversにアクセスします。レシーバーのボックスにもバッテリーをつなぎ電力を供給します。
ネットワーク設定

GPSとIMUを調整する
少し時間が経つとGPSが受信され左上のステータスが緑に変わります。屋根があるような場所や補足が弱い時は、付属のGPSアンテナをご利用ください。
IMUをキャリブレーションするには、8の字で回転させ、IMUキャリブレーションバーがいっぱいになり緑色になるまで続けます。
左メニュー
- Position
- Receivers
- Settings
- Diagnostic
- About
Position

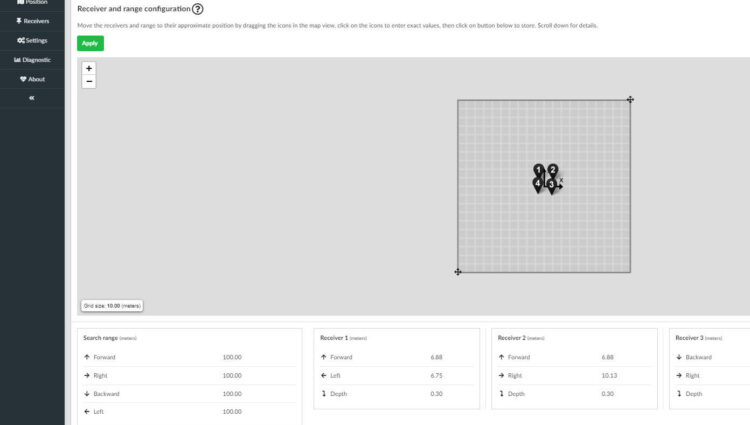
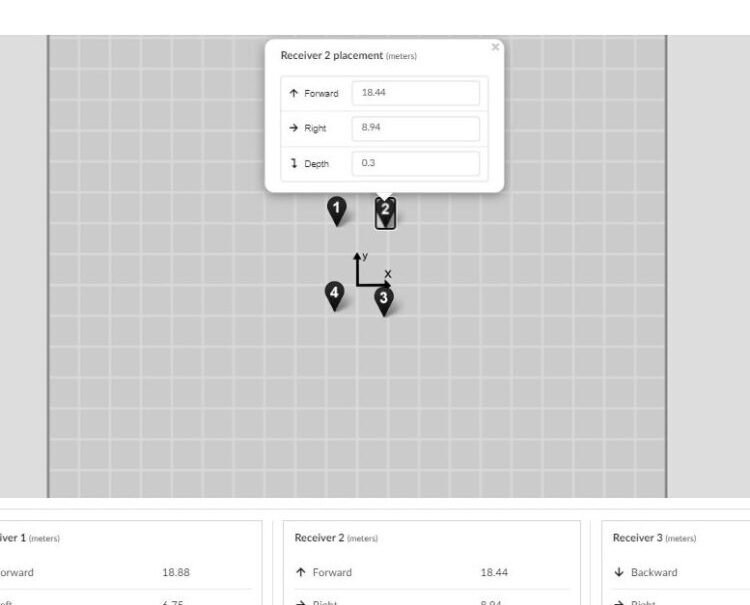
Receivers
レシーバーの1~4の位置と深さを設定します。画面上のXYはボックスに記載されているXYと合わせます。番号のアイコンをクリックすると数値の入力ができます。
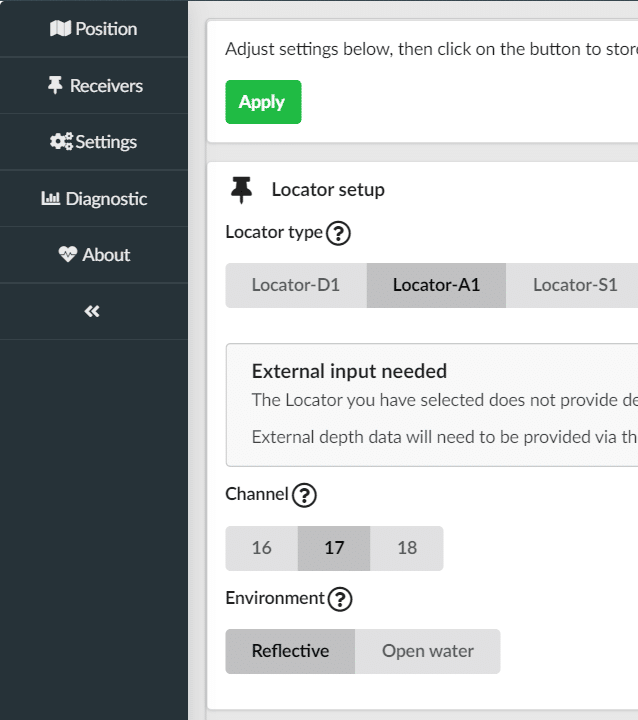
Settings
Locator type
Locator-A1
Channel
17
Environment
- Reflective(プールなど)
- Open water(海など)
GPS
On-board
Compass
- On-board
- Static(ここの次の数値の入力は方位角です。入力した数値に合わせてXYの角度が変わります。)
Units
Metric
Reference boat outline in map
Visible
Latitude/longitude of Locator in map viwe
Visible
設定が終わったらApplyをクリックして保存してください。
Diagnostic
About

https://www.ardusub.com/developers/gps-positioning.html
ソフトウェアの更新
ホストコンピュータがインターネットに接続されている場合、システムは自動的に更新をチェックします。最新のリリースをお持ちの場合は、以下に示すように緑色のチェックマークが表示されます。新しいリリースが利用可能かどうか表示があります。
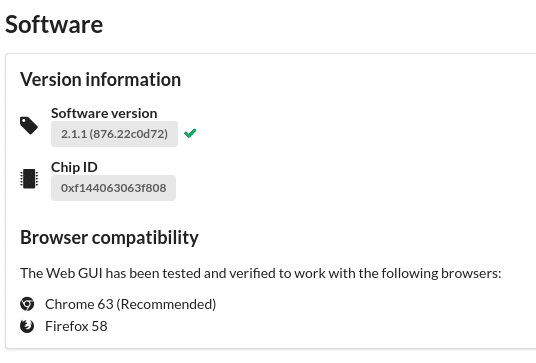
ソフトウェア更新パッケージ(.wlupファイル)には、システムの更新に必要なすべてのファイルが含まれています。ソフトウェアパッケージは暗号化されており、生成されたチップIDに対してのみ機能します。チップIDは、Aboutにあります。
更新の方法(静的IPを使用して更新する)
-
- ソフトウェアパッケージをダウンロードする。
こちらにアクセスして、チップIDを入力しソフトウェアパッケージ(.wlup)ダウンロードします。
-
- システムの電源を切ります。
- キットに含まれているジャンパーケーブルを使用してGPIO0をアースに接続します。
- システムの電源を入れます。
- Web GUIhttp://192.168.2.94にアクセスします。
- ジャンパーケーブルを取り外します。
- 「ファイルの参照」をクリックして、wlupファイルを選択します。
- 更新プロセスが完了するのを待ちます
- 更新プロセスが完了して成功すると、システムは自動的に標準モードで再起動します。
- Web GUI https://192.168.2.94にアクセスして、SWバージョンが更新されたことを確認します。
- アップグレード完了です。

