


BlueRobotics社の「Ping360スキャンイメージングソナー」です。
スキャンイメージングソナーとは?
スキャニングソナー、スキャニングイメージングソナーなどといわれることもありますが、すべて同じものです。
Ping360は視界不良の水中でもスムーズにナビゲーションしてくれるツールになります。
水中でPing360から放った信号に対してエコーを探知し、その振動を一度ずつずらすことで対象物の画像を生成します。これは気象レーダー等にも使われている技術です。確認できるエリアは周囲50メートルで、深度300メートルまでです。
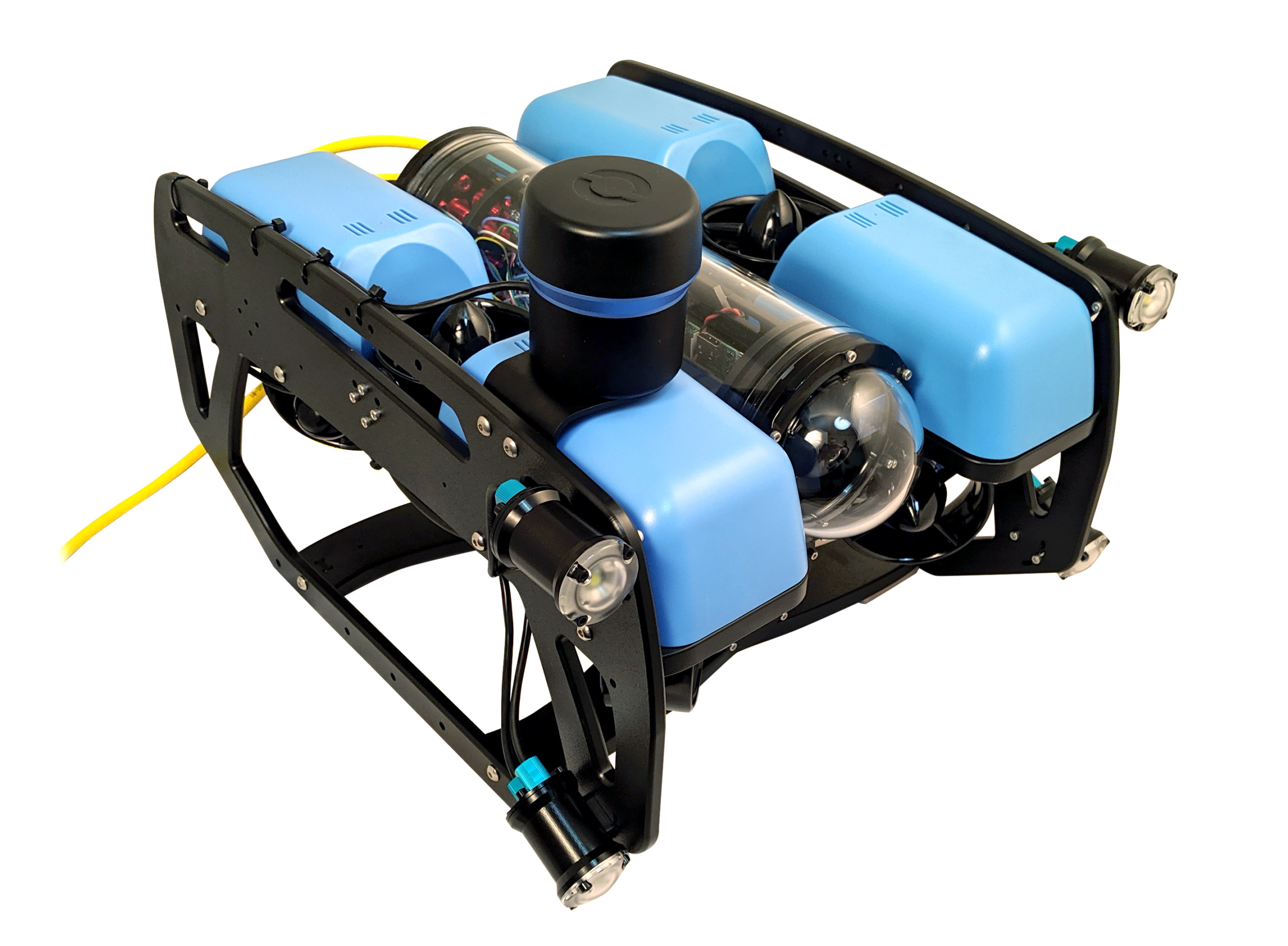
ROVに搭載することで周囲を上から下まで見渡すことができ、ロープや壁、桟橋や岩、難破船、ボート、魚などの音波を反射するあらゆる構造物や物体からの反響を確認できます。
これにより水の透明度に関係なく航行に重要な基準点を得ることができ、水中の重要な特徴をいち早く見つけることができます。
オープンソースなので障害物回避や検査、ターゲットの位置確認と追跡、システ自律システム開発としても適しています。BlueROV2以外のROVにも対応可能です。
内部構造
Ping360は上部にオイル充填部、下部に空気充填部がある設計になっています。アルマイト製のケースと貫通部取付済みの1メートルのケーブルがあり、最大水深は300メートルです。
底面には4つのM3取り付け穴があり、BlueROV2やその他の機器に簡単に取り付けられるよう、付属のブラケットがあります。
ソナーは音響周波数750kHzで動作し、ビーム幅は水平方向に2度、垂直方向に25度です。電圧は11~25Vに対応、通信プロトコルはUSB、RS485、イーサネットで通信できます。
Ping360ではBlueROV2に使用するために必要なものはすべて付属済みですので、すぐに利用可能です。
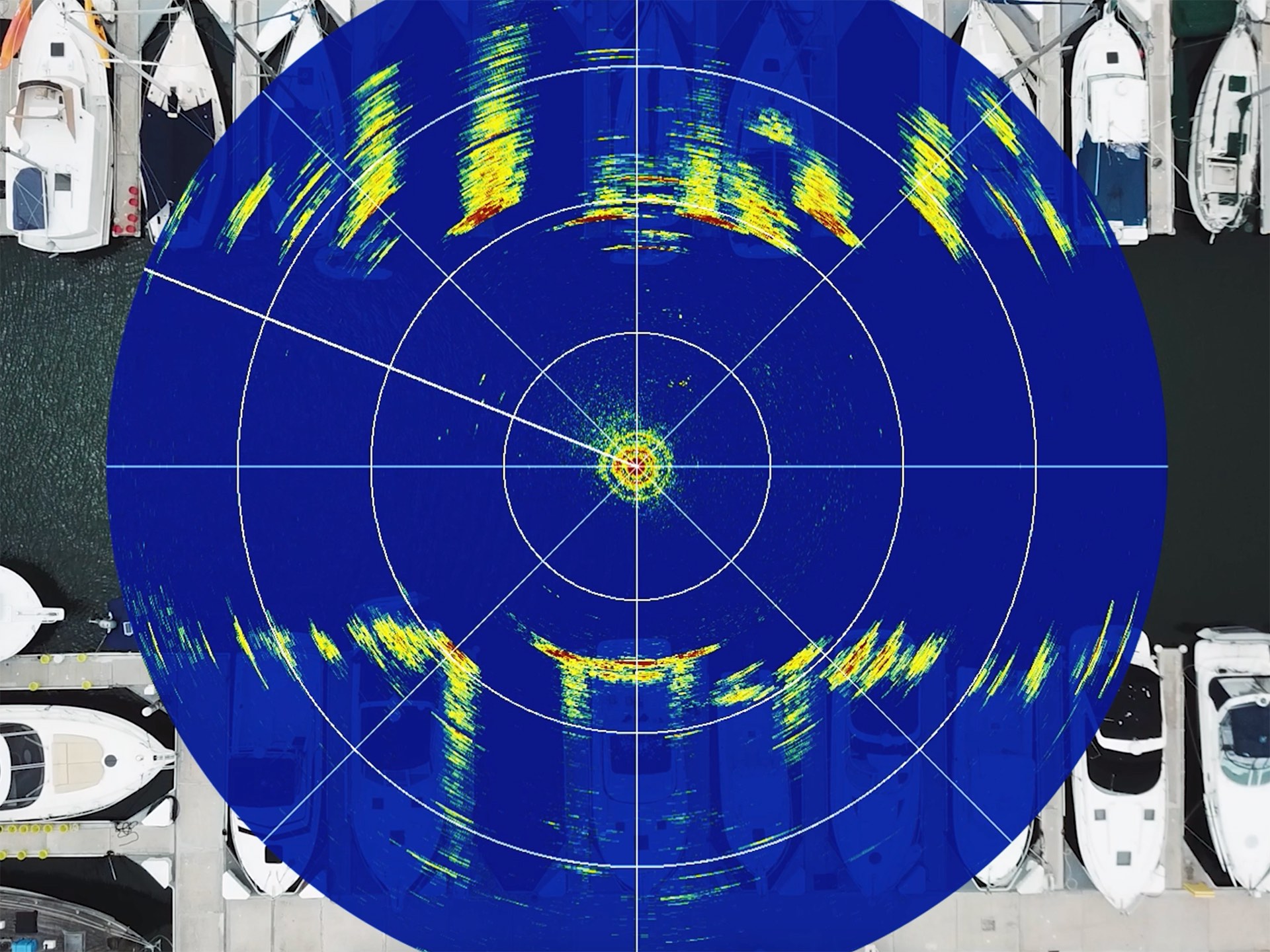
下記の動画は水中ドローンBlueROV2に搭載するPing360スキャニングイメージングソナーの紹介です。水中ドローンを運用していると水の濁りが強くカメラの映像だけでは対象物を見つけることができず、方向もわからないことが多々あります。そのような場合にスキャニングソナーを使うことで対象物を可視化することができます。
商品内容
ソナー
- Ping360 スキャニングソナー、ケーブルと WetLink ペネトレータが取り付け済み × 1
- ペネトレーターナット × 1
- ペネトレータOリング × 1
金具
- Ping360取り付けブラケット × 1
- M3x5 ボタン頭キャップネジ × 4
- M5x12 ボタン頭キャップネジ × 2
配線
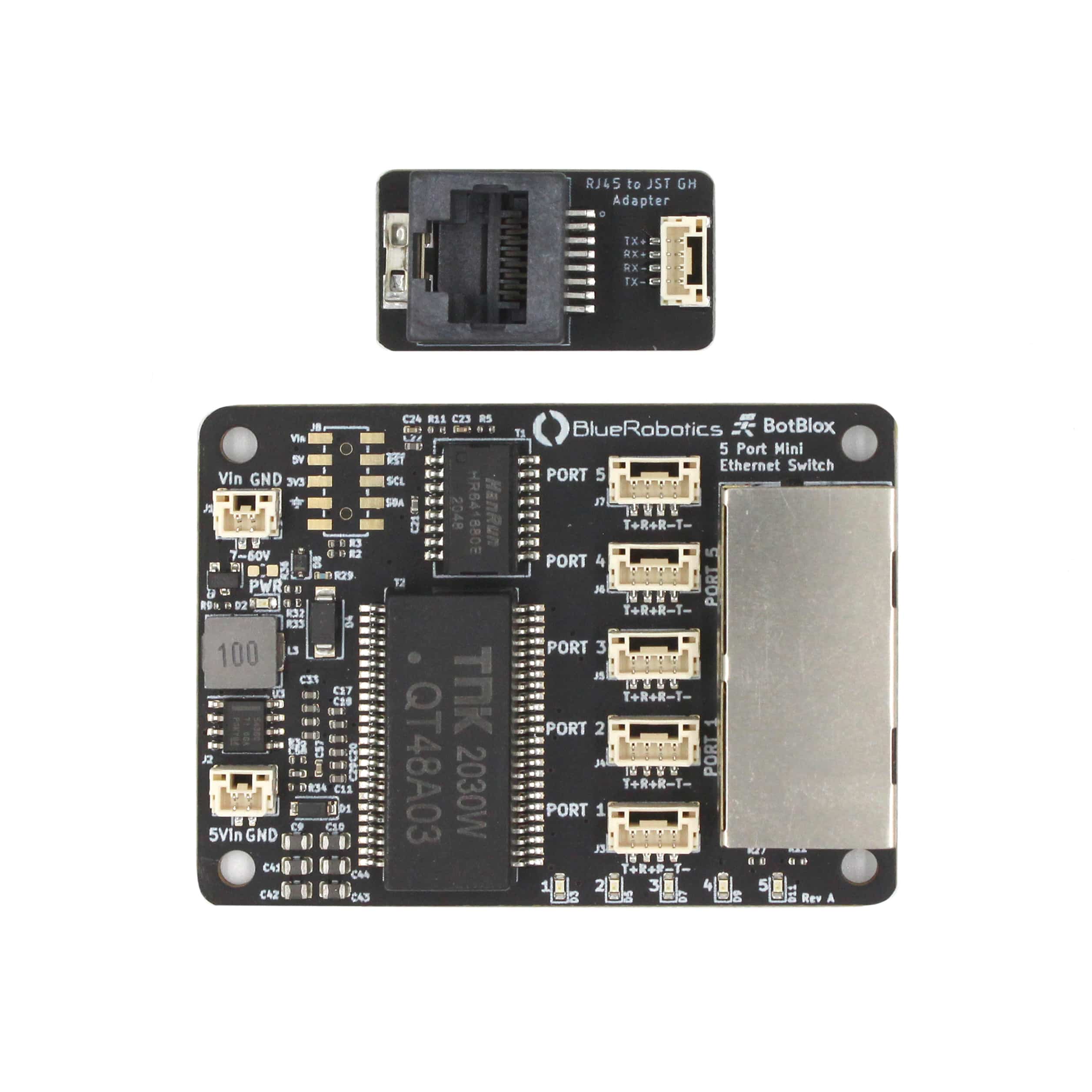
- 4ピン JST-GH – 4ピン JST-GHアダプターPCB × 1
- 4 ピン JST-GH – USB-A アダプター (USB 構成用) × 1
- 4 ピン JST-GH – オスヘッダー ピン アダプター (RS-485 構成用) × 1
水中ドローンBlueROV2搭載ソナー
| パラメータ | 値 | |
| 最大供給電圧 | 25ボルト | |
| 最小供給電圧 | 11ボルト | |
| 最大消費電力 | 5 W | |
| 信号プロトコル | USB、イーサネット、RS485 | |
| 電源線 | 黒 | Ground |
| 赤 | Vin | |
| オレンジホワイト | Vsense | |
| 緑-白 | D- | |
| 緑 | D + | |
| オレンジ | GND | |
| オレンジホワイト | TX+ | |
| 緑-白 | RX+ | |
| 緑 | RX- | |
| オレンジ | TX- | |
| オレンジホワイト | Not Used | |
| 緑-白 | D- | |
| 緑 | D+ | |
| オレンジ | GND | |
| 音響 | ||
| 周波数 | 750 kHz | |
| ビーム幅-水平 | 2° | |
| ビーム幅-垂直 | 25° | |
| ビーム幅-垂直 | 0.75メートル | |
| 最大範囲 | 50メートル | |
| 範囲分解能 | 範囲の0.08% | |
| 50mでの範囲分解能 | 4.1cm | |
| 2mでの範囲分解能 | 1.6mm | |
| 機械的解像度 | 0.9° | |
| スキャンされたセクター | 360°まで可変 | |
| 2mでのスキャン速度 | 9秒/ 360°* | |
| 50mでのスキャン速度 | 35秒/ 360°* | |
| 商品 | ||
| 圧力定格 | 300メートル | |
| 温度範囲 | 0-30°C | |
| 空気中の重量(ケーブル付き) | 510 g | |
| 水中重量(ケーブル付き) | 175 g | |
| ソナー取り付けネジのサイズ | M3x0.5 x 5 mm | |
| 取り付けブラケットのネジサイズ | M5x0.8 x 12 mm | |
*これらの値は、ソフトウェアの最適化によって改善されると予測されています。


BR-100399