2017年6月、宮城県内にある大型定置網の「垣網」、「箱網」の調査を水中ドローン(BlueROV2)で行いました。
BlueROV2 の特長

BlueROV2はアメリカにあるBlue Robotics社が発売しているROVです。
この水中ドローンはフライトコントローラーPixhawkを搭載し6つのモーターで自由に海中を動き回ります。
最大350ワットのモーターは海中でも思い通りの操縦を実現させ、細かい機体の動きにも対応できます。
またこのORVはカスタマイズ性にも優れており、ペイロードを増やしたり100m以上の深度に耐えられるように仕様変更が可能です。
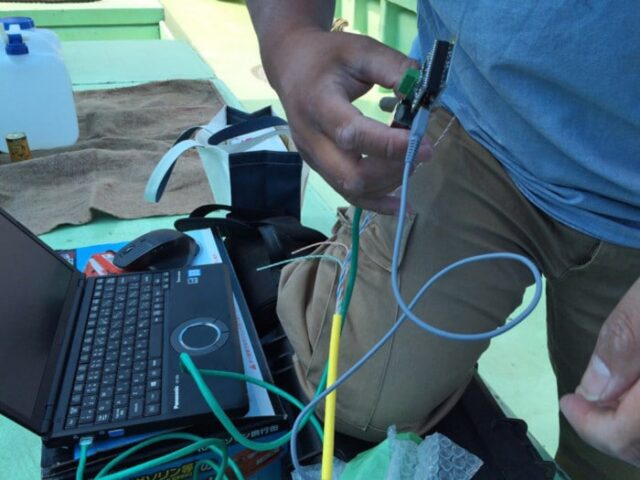
今回使用したROV以外の装備
ROVの操作には本体以外にも必要なものがあります。
操縦以外にもメンテナンスで必須のものもあるのでご紹介します。
- ノートパソコン
- LANケーブル
- USB2.0 mini-Bケーブル
- Logitech F310 Gamepad
- 手動真空ポンプ
- 真水
- ROVが入るサイズのタンク








操縦環境
BlueROV2の操縦は下記のソフトで行います。
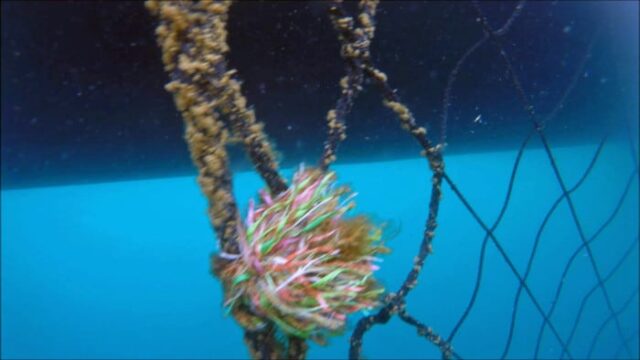
水深約20mの垣網調査
水深約20mの垣網の調査です。

網の様子や海底の状況などを確認することができました。網の損傷や地形の状況確認などに活用できます。






水深約60mの垣網調査
水深約60mの箱網です。今回使用したROVは、100mのテザー(有線)を使用しています。

この場所は魚が集まっている場所ですので、さばやぶりなど多くの魚の様子を確認することができました。

また海底の網の様子も確認でき、水深60mでも問題なく動き回る事ができます。

今後の課題
今回の水中調査では、はじめてBlueROVを使いました。
これは以前まで使っていたOpenROVとは異なり、操縦性が非常に優れています。
海のように波が強い場所でも自由に操縦することが可能で、今後の弊社の主力となる機体です。
ただし、途中で故障した箇所もありました。原因はまだ不明。
今後、メンテナンスをしながら改善します。
故障個所
- 1つのモータの出力が下がる
- ライトが途中から一部点かなくなる
この水中ドローンは4つのモーターで前後左右の動きをし、2つのモーターで水平や潜ったり浮上したりの動きを制御しています。
今回1つ出力が弱くなったのは、潜ったり浮上したりするモーター。
このモーターの動きが弱くなると、左右の出力のバランスが狂い、潜る時も浮上するときも機体が斜めに傾きます。
1つのモータの出力だけでも水深60mまでは潜る事ができましたが、映像は斜めになったままです。
もう1点はライトの故障。4つ搭載しているライトが1つしか点かなくなりました。
今後、これらの原因を探りつつ、改善します。
今回は予備の機体を用意していなかったので、故障した機体のまま調査を続けました。やはり2機体制は必須であると痛感しました。
{kind=link}