2016年から開催している秋の北海道一大ロボットイベントといえば……そう、十勝上士幌で行われるジャパンイノベーションチャレンジです。
われわれは2017年から挑戦していますが、今年は何と初めての課題3「救助」に「日本RoboTEX」チームとして挑み、見事「上士幌町長賞」を受賞することができました!


あらためて課題の概要とコンテストの結果をご報告いたします!
ジャパンイノベーションチャレンジ(JIC)とは?
「Japan Innovation Challenge」は全国にあるさまざまな課題を解決&チャレンジすることを目的とした活動であり、2016年から山間部での遭難救助を想定したロボットコンテストを行っています。
第4回 ロボットによる山岳遭難救助コンテスト 2019
https://www.innovation-challenge.jp/alpine-rescue/
コンテスト実施期間
2019年10月9日(水)〜11日(金)
2017年からは自動運転バスの実証実験、今後は生活支援をテーマとしたロボットコンテストも予定されています。
山間部での遭難救助はJIC初期から行われている活動でもあり、2019年で4年目。
- 「発見」
- 「駆付」
- 「救助」
のミッションがあり、開催期間中は参加チームがドローンやロボットを使ってコンテスト課題に取り組むことになります。
過去のJIC山岳救助コンテスト状況
課題1「発見」は主に空からのドローン捜索になります。
課題2「駆付」も同じく空からのドローンが活躍し、救援物資を要救助者の元へ運ぶことになります。
問題となるのが課題3「救助」で、こちらは無人機で要救助者を指定場所まで搬送するというものです。
空からそれができる技術は今のところ難しいため、大体が陸路となっています。
課題1、2と違い機体の製作からはじめなければならず、技術的にも開発費的にもレベルの高い課題であり、過去にもチャレンジは2チームだけ。
なかなか良い結果はでていないようです。
コンテストは天候に左右され中止となることもあったものの、課題1と2のクリア達成チームは年々増え、昨年は高難易度となる夜間開催も行われました。
われわれは2017年の第二回開催から空からドローンを使って「発見」「駆付」参戦。
特に「駆付」に関しては複数回の課題達成となるなど、かなりの手ごたえを経験してきました。
JIC2019は昼間の開催に。「救助」挑戦へ
夜間開催が行われた2018ですが、2019は再び日中開催に戻ったため、難易度的には2017の状況に戻ったことになります。
となると、過去コンテストで空からのドローン参戦での手ごたえを感じていたわれわれとしては、ちょっと考えどころです。
おそらくほかの達成チームも同様かと思いますが、精度を上げることはできても「新たな課題へ取り組む姿勢」という点では少し違ってきてしまいます。
そういった経緯もあり今年は課題1、課題2への参加はあえてせず、課題3へ挑戦することになりました。
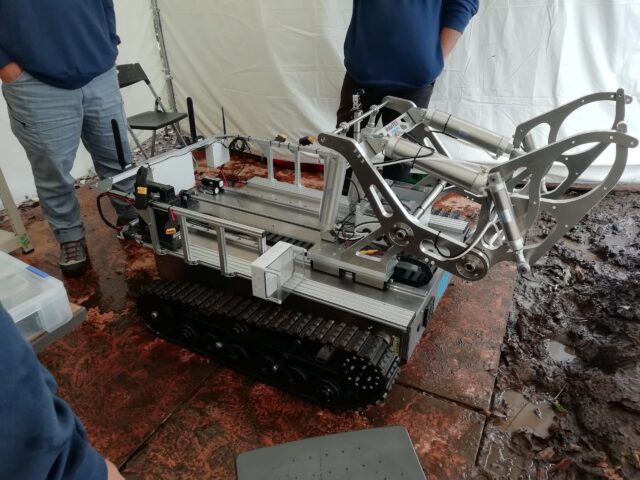
使用する機体はローバー型。
大きなアームをつけた小型戦車といった感じです。
JIC2019結果報告
今年の参加チームは8チーム。
チームが少ない理由として事前書類審査があるのですが、コンテストの趣旨にあっていないとおそらく参加できない厳しい内容になっているかと思います。
課題3への参加はわれわれのチームだけでした。
JIC2019(10/9)コンテスト1日目

かなりの悪天候。
スタンバイをしていたものの、やむを得ず断念しました。
そのためこの日は、デモ走行や改良を行うことになりました。

当初は無線のアンテナにて映像送受信を行う予定でしたが「それでは弱い」との助言をいただき、無線の改良をしながらも他の方法での伝送を模索することに。
さらには、アームについて細かなことをディスカッションしました。



一度コンテスト現場から離れて、上士幌航空公園空港にてデモ走行を。
芝生上でのデモ走行で、キャタピラに草が絡まることが判明。
コンテスト終了後には、伝送について携帯の回線を使うという案から改良を行うとともに、プログラミングを組んだり無線のアンテナを改良したりしました。

具体的には、現場テントに建てるアンテナと、ローバーの無線装置を伸ばして強化する等を行うことになりました。
ちなみにこの日の大会自体は、一部競技中止という状況になりましたが、いずれの課題も達成チームなしという結果でした。
JIC2019(10/10)コンテスト2日目
晴天。
肌寒さはあるものの風もなく、他チームのドローンにとっても好都合な天候に。
この日が初めての本番走行になります。

まずはドローンMavicでPro、zoom等を使いつつ、マネキンへのルート調査を行いました。
このとき高度が低すぎると映像伝送が悪く、かなり困難に。

救助用機体(ローバー)にスマホを装着させ、映像伝送の強化を図ってから走行しました。
スタートしてから順調に走るローバー。
過去開催の同課題の機体よりもさらに先に進んでいき、期待感が増してきます。
[youtube id=7wELfjvkt9c]
順調にいくと思われていたころ、途中で映像伝送が途切れました。
再度走らせるには時間が足らず、やむを得ずこの日はここで断念という結果に。

コンテスト終了後は、問題となった映像伝送についてさらに改良するため、ひたすらディスカッションです。
どのような伝送が最適かをとことん話し合いました。
ちなみにこの日は課題1で1チーム、課題2で2チームが達成という結果でした。
JIC2019(10/11)コンテスト3日目

前日と同じく絶好の大会日和です。
この日が今大会最後の本番走行となります。

1日目からのディスカッションの成果は、改良したローバーをみると一目瞭然です。

上空から調査するMavicのモニターから、走行しているローバーの位置が少しでも分かるよう点滅型のライトを装着しました。
さらに自分たちのスマホも持ち寄って、前日よりも多い2台装着させることにしました。
無線とLTE、2つの通信回線をフル活用しての挑戦です。

ちなみにLTEでの映像伝送手段は、LINEとカカオトークのビデオ通話。
これにより音声もつながります。

定期的に調査用としてドローンMavicを飛行させるものの、他の機体が複数存在すると伝送が弱くなるため、頃合いを見計らいながらの調査飛行になります。

ローバーはスムーズに進んでいったものの、救助用マネキンまであと10メートルほどのところで丸太や地面状況の悪さから機体ごとひっくり返ってしまい、結果的に課題達成に至ることなく終了となりました。


ただ達成はしなかったものの、これまでの経験と知識、培ってきた多くの知恵と工夫を凝らしたということから、急きょ「町長賞」が設けられ表彰されることに……!
今回は達成できずに残念でしたが、改善点などの方向性もみえ、次回のコンテストへ挑むという前向きな気持ちが大きく芽生えた大会となりました。
ちなみにこの日は課題1、2いずれも達成チームなしという結果でした。
課題3「救助」達成に向けて考える
これまで課題3への挑戦そのものが少なかったため、ルールなどが一部あいまいな点もあるかなと思いますが、われわれとしては来年も挑むつもりです。
ただ、やはり難易度は相当なものです。
課題3「救助」について考察してみました。
災害対応ロボットの現状
日本では2011年の東日本大震災や原子力発電所事故以降、災害対応ロボット(レスキューロボット)の開発や研究が積極的に行われています。
現状の開発の方向性は主に2パターン。
- 「捜索」や「観測」など間接的作業を行うもの
- 「がれき撤去」などの直接的作業を行うもの
に分かれます。
山岳救助のイノベーションチャレンジでいうと課題1,2は前者ですが課題3はそれに加え直接的作業もあり、介護ロボットのような能力も必要になってきます。
イノベーションチャレンジでは2020年夏に生活支援ロボットコンテストが予定されていますが、こちらの能力が必要になるかもしれません。
山岳救助には複数作業が求められる
課題3は「要救助者を安全に目的地まで連れ帰る」必要があるので、そのためにはそれなりのサイズのロボットが必要になります。
今回ローバー型で挑みましたが山岳では足場が悪く、要救助者の元へたどり着くのが非常に難しくなり、上空からにくらべると圧倒的に不利です。
さらに「捜索(現地までの移動)」と「介助(救助)」といった全く別の作業を行うとなれば一台では難しく、別の役割を持った複数台のロボットが必要になるかもしれません。
いずれにしろロボットに求められるレベルはかなり高いものになります。
ただ屋内や人が立ち入りづらい災害現場などで、今後こういったロボットの需要は高まってくることでしょう。
難易度は非常に高いですが、われわれも今回の経験を活かし、今後も研究・開発を行っていきたいと思います。
お問合せはこちら
国家ライセンス制度、補助金、講習内容など、ご不明点はいつでもご連絡ください。講習日に見学も受け付けておりますのでお気軽にお問い合わせください。


〒981-3203
宮城県仙台市泉区高森4-2-342
電話:022-739-8861
Mail:info@xd-fun.com